
April, 2023
Imagine exploring a new city without a map or GPS, trying to find your way around the streets and landmarks – it would be quite a challenge. Now, picture a robot attempting to do the same thing, exploring an unknown terrain or even operating with a predefined map but requiring the flexibility to adapt to changes in its surroundings. This is where a fascinating technology called Simultaneous Localization and Mapping (short: SLAM) comes into play.
We like to think of SLAM as the autonomous mobile robot’s (AMR) eyes and brain, helping the robot navigate through its environment. It involves two main processes: localization, which is the robot’s ability to determine its position relative to the environment, and mapping, which refers to the robot’s ability to create a map of the environment as it explores it. By combining these two processes, SLAM enables robots to effectively navigate and understand their surroundings.
This blog post aims to provide an overview of the captivating realm of SLAM in robotics, explaining the concept, functioning, and significance for idealworks, and shed some light on the various benefits it provides to our clients.
What is SLAM
SLAM is a technique used by autonomous vehicles and robots to build a map of their surroundings (mapping) while simultaneously keeping track of their position within the map (localization). The robot can then use the generated map to perform tasks, such as path planning and obstacle avoidance. Although numerous mapping and localization solutions exist, the power and complexity of SLAM lie in its ability to simultaneously accomplish both tasks.
One might view this as a classic chicken-and-egg dilemma: a map is needed to determine one’s location, yet knowledge of one’s location is essential to create the map. Despite this intricate issue, several methods have made significant progress in resolving it after years of research.
How does SLAM work?
To comprehend the functioning of SLAM, let’s revisit our previous example of navigating an unfamiliar city without a map or GPS. Under such circumstances, it is easy to get lost and have difficulty locating landmarks or specific destinations. However, in your hometown, you remember the locations of streets, buildings, and other significant landmarks. You have a mental map that allows you to travel safely even with limited visibility or information. Creating this mental map requires exploring the city multiple times and understanding your location by noting relationships between landmarks, such as “the park is halfway between the library and the train station.” Therefore, if you are at the library, you know the direction and distance to walk to reach the park. SLAM works in a very similar way. It identifies landmarks, determines their position in relation to other markers, and then continues to explore the environment until it accumulates sufficient data to construct a comprehensive map of the area.
One of the most prevalent techniques of SLAM integration in robotics is by using various sensors, such as cameras or LiDARs. These sensors collect data about the robot’s environment, which are then processed by specialized algorithms. This allows the robot to generate a map and determine its location within that map while adapting to any modifications it encounters.
On our AMR iw.hub, we have two LiDAR sensors. LiDAR, which stands for Light Detection and Ranging, is a sensing technology that uses lasers to measure distances and create detailed, high-resolution representations of the environment. It works by emitting laser pulses and measuring the time it takes for the pulses to reflect back after hitting objects or surfaces.
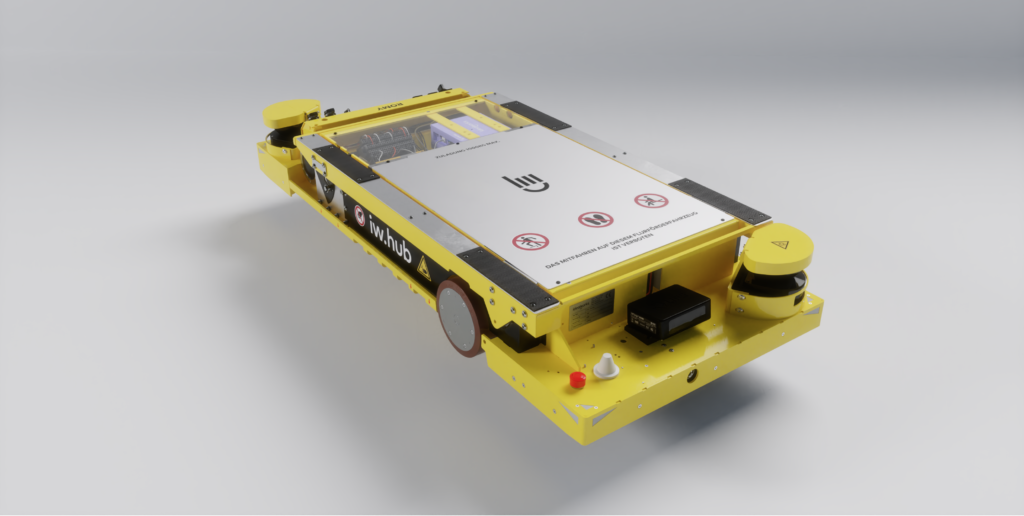
The highly accurate sensors data gathered from our LiDARs, in combination with odometry data, an estimation of the position and orientation of the vehicle using its wheel rotations and angles, help in creating and updating the map while localizing our iw.hub within it.
This LiDAR-based mapping and localization method provides numerous benefits to our AMR. It offers improved robustness in varying lighting conditions, reduces dependence on visual features like color and texture, and enables the AMR to operate in cluttered environments while maintaining an accurate map of the AMR’s surroundings.
Why is SLAM Used?
Efficient navigation and task performance for robots, much like humans, requires knowledge of their surroundings. Hence, mapping and localization play a crucial role in achieving these objectives. There are numerous techniques available to perform these tasks, each with its unique set of advantages and limitations. Some of the most prevalent techniques include:
- Marker-based localization, which requires known markers like QR codes or AR tags in the environment for the robot to determine its position.
- WiFi-based triangulation, where the robot measures the signal strength from nearby access points to estimate its location.
- GPS (Global Positioning System), which relies on satellite signals but is primarily used for outdoor localization.
- SLAM/Lifelong SLAM, where the main difference is the time scale on which they operate. SLAM focuses on real-time navigation based on mapping that occurred once, while Lifelong SLAM focuses on maintaining maps over extended periods, accommodating changes in the environment.
When compared to other methods, the Lifelong SLAM approach utilized by idealworks offers several notable advantages, including:
- Adaptability: With Lifelong SLAM, robots can easily adapt to new or changing environments without the need for pre-existing maps, making them more versatile and cost-effective, as there is no need to make changes to infrastructure or add new sensors.
- Efficiency: SLAM allows robots to navigate and perform tasks more efficiently, as they continuously update their understanding of the environment and adjust their actions accordingly. The robots have the freedom to navigate without being constrained to fixed paths or magnetic rails.
- Completeness: SLAM enables robots to build a map of their environment while simultaneously localizing themselves, providing a more complete solution compared to methods that focus solely on mapping or localization.
- Autonomy: SLAM is an integral part in the development of truly autonomous robots and vehicles, enabling them to operate independently without human intervention or supervision.
Equipping robots with SLAM technology provides significant value as it enables them to navigate complex environments autonomously, increasing efficiency and adaptability, while reducing operational costs for operators.
SLAM is a powerful technique in robotics that allows robots to map their surroundings and accurately locate themselves within that map. This allows them to efficiently navigate complex environments, adapt to changes, and ultimately reduce operational costs. As robotics continues to advance, SLAM will be crucial in enabling robots to perform tasks autonomously, without human intervention or supervision.
At idealworks, we are committed to incorporating the latest cutting-edge technologies into our solutions, ensuring that our clients receive unparalleled value and a competitive advantage in their industries. By embracing SLAM technology, we can unlock the full potential of robots and create more efficient, versatile partners in our daily lives.



